МОБИЛЬНЫЕ РОБОТЫ: ИССЛЕДОВАНИЯ, РАЗРАБОТКИ, ПЕРСПЕКТИВЫ
20.04.2012
МОБИЛЬНЫЕ РОБОТЫ: ИССЛЕДОВАНИЯ, РАЗРАБОТКИ, ПЕРСПЕКТИВЫ
Ф.Л. ЧЕРНОУСЬКО, академик, директор Института проблем механики им. А.Ю. Ишлинского Российской академии наук.
Н.Н. БОЛОТНИК, член-корреспондент РАН, заведующий лабораторией робототехники и мехатроники Института проблем механики им. А.Ю. Ишлинского Российской академии наук.
В.Г. ГРАДЕЦКИЙ, доктор технических наук, профессор, Заслуженный деятель науки Российской Федерации, главный научный сотрудник Института проблем механики им. А.Ю. Ишлинского Российской академии наук.
Робототехника – наукоемкая инженерная отрасль, чрезвычайно интенсивно развивающаяся во всех странах, заботящихся о своей технологической конкурентоспособности, здоровье своих граждан, безопасности и комфортности их жизни. Робототехнические системы – база автоматизации современной промышленности, транспорта, медицины, военного дела, космонавтики и других сфер деятельности людей. Промышленные роботы давно стали привычным технологическим оборудованием на предприятиях автомобилестроения, авиастроения, судостроения, приборостроения. Они выполняют разнообразные операции, среди которых точечная и дуговая сварка кузовов автомобилей, сборка изделий, обслуживание кузнечно-прессового оборудования, автоматический контроль готовой продукции. Роботы используются работниками спецслужб для обнаружения и уничтожения взрывных устройств, заложенных террористами. Робототехнические системы интенсивно внедряются в медицинскую практику в качестве оборудования для производства минимально травмирующих хирургических операций и диагностики различных заболеваний. Активно ведется разработка и выпуск на рынок роботов широкого потребления для использования в быту. Наиболее известные примеры – робот-пылесос, автоматически производящий уборку помещения, и робот-газонокосильщик. Возможно, недалек тот день, когда в продаже появится недорогой универсальный обслуживающий робот, который станет таким же привычным предметом бытовой техники, как стиральная или посудомоечная машина.
Успешное развитие робототехники требует прочной и глубокой научной базы, которая создается объединенными усилиями ученых в области механики, прикладной математики, теории управления, информатики. Несмотря на значительное отставание от ведущих «роботопроизводящих» стран, прежде всего, от США и Японии, по количеству выпускаемых роботов и их разнообразию, Россия занимает достойное место в мире по научным разработкам в области робототехники. Результаты российских ученых получают признание международной научной и инженерной общественности, в том числе в роботопроизводящих странах. Российские ученые регулярно приглашаются на крупнейшие научные конференции по робототехнике с пленарными докладами, их статьи печатаются в ведущих международных журналах, а книги издаются крупнейшими издательствами. Они участвуют во многих международных проектах по перспективной робототехнике, финансируемых научными фондами разных стран, получают международные премии. Россия представлена в крупной Международной программе по перспективной робототехнике (International Advanced Robotics Program – IARP). Эта программа ориентирована на проведение фундаментальных и прикладных исследований в области механики, измерительно-информационных и управляющих систем роботов. Среди стран-участниц этой программы – такие признанные лидеры мирового роботостроения, как США, Япония и Корея.
Значительная доля в передовых достижениях ученых России в области робототехники принадлежит Российской академии наук. Исследования в этом направлении ведутся во многих институтах РАН, среди которых Институт проблем механики им. А.Ю. Ишлинского, Институт прикладной математики им. М.В. Келдыша, Институт проблем управления им. В.А. Трапезникова, Институт машиноведения им. А.А. Благонравова, Институт механики им. Р.Р. Мавлютова Уфимского научного центра РАН, Институт автоматики и процессов управления Дальневосточного отделения РАН и другие. В этой статье мы расскажем об исследованиях в области динамики и процессов управления движением мобильных роботов, ведущихся на протяжении многих лет в Институте проблем механики им. А.Ю. Ишлинского Российской академии наук.
Мобильные роботы, которые иногда называют также локомоционными роботами, служат автоматическими транспортными средствами. Они доставляют материалы, технологическое или иное оборудование к месту проведения работ. Мобильные роботы традиционных конструкций перемещаются с помощью колес, гусениц или ног и могут двигаться по местности с весьма сложным рельефом, однако наклон поверхности передвижения не должен быть слишком велик. В то же время имеется потребность в роботах, способных двигаться по поверхностям с произвольным наклоном, а также по стенам и потолкам. Такие роботы нужны пожарным для доставки средств тушения огня к месту возгорания на высоких зданиях, строителям и службам эксплуатации высотных зданий и сооружений для производства различных работ, например, штукатурных, покрасочных или сварочных. Они нужны на атомных электростанциях для технической инспекции помещений, в которых размещены реакторы, а в аварийных случаях – и для дезактивации этих помещений.
В Институте проблем механики разработано несколько типов мобильных роботов для перемещения по поверхностям произвольного наклона. Фиксация таких роботов на поверхности осуществляется с помощью вакуумных захватов (присосок), которые располагаются на стопах робота, если он шагающий, или выполнены в виде полостей со скользящим уплотнением в зоне контакта с поверхностью, если робот передвигается с помощью колес. Прижимание робота к поверхности происходит за счет разности давлений воздуха в полости захвата и в окружающей атмосфере. Если прижимающая сила достаточно большая, робот не оторвется от поверхности, а трение не позволит ему соскальзывать.
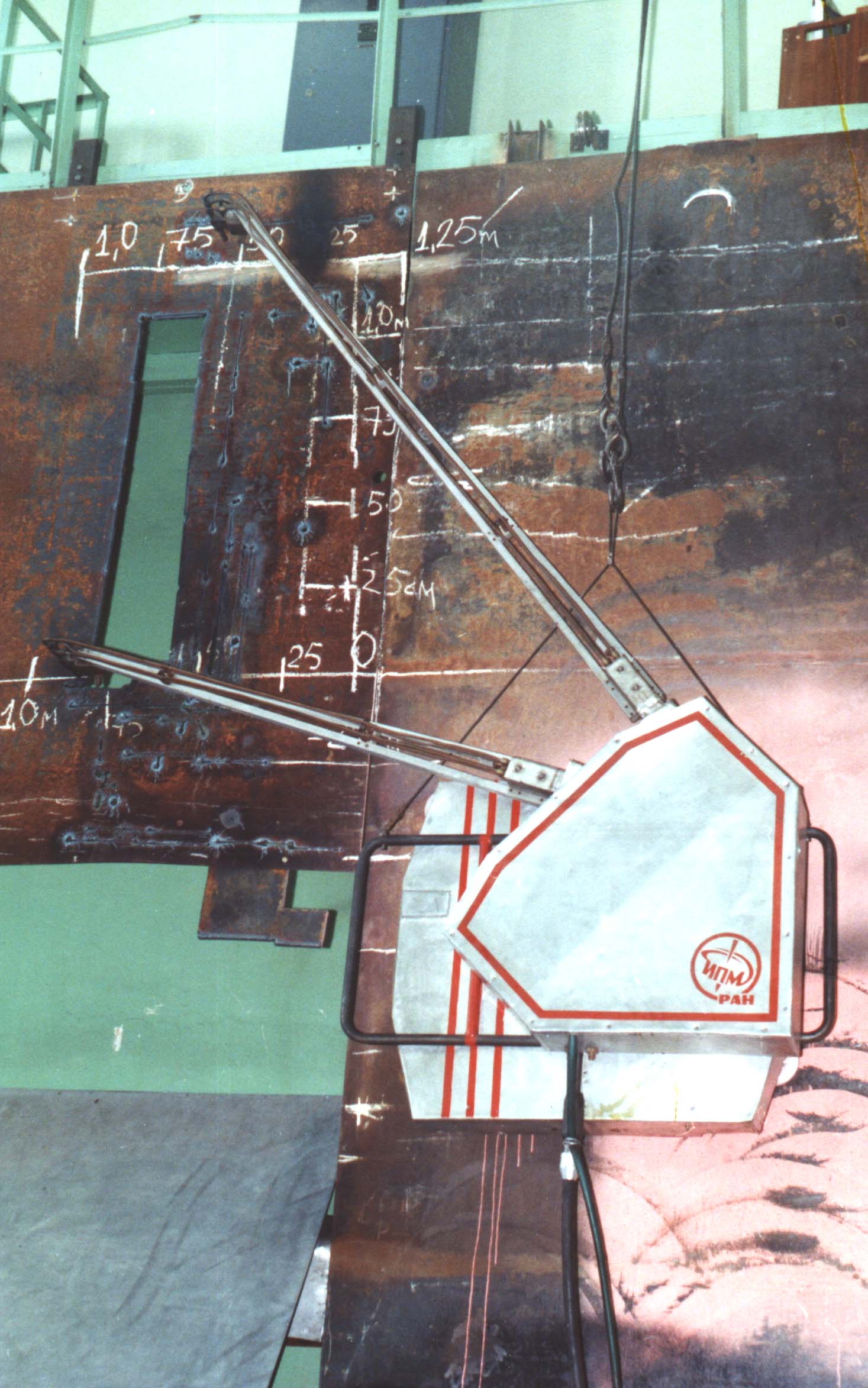 Рис. 1
Рис. 1
На рисунке 1 показан транспортный модуль робота большой грузоподъемности (до 150 кг). Он имеет две платформы, которые могут поступательно перемещаться друг относительно друга с помощью пневмоприводов. Каждая платформа снабжена четырьмя стопами с вакуумными захватами. При движении робота одна из платформ неподвижно закреплена на поверхности вакуумными захватами (находится в опорной фазе), а другая движется (находится в фазе переноса). Захваты платформы, находящейся в фазе переноса, отведены от поверхности и не касаются ее. Чередуя фазы опоры и переноса платформ, робот пошагово перемещается в заданном направлении. Изменение направления движения осуществляется поворотом всего робота вокруг специальной стопы, также снабженной вакуумными захватами.
В настоящее время Институт проблем механики совместно с Московским государственным технологическим университетом «Станкин» разрабатывают гамму роботов данного типа грузоподъемностью от 1,5 до 50 кг для выполнения технологических операций на предприятиях машиностроения. Роботы будут оснащены сменным оборудованием для механической обработки, резки, покраски и неразрушающего контроля протяженных поверхностей. Они также смогут использоваться для обслуживания и технической инспекции корпусов судов в доках, а также больших емкостей в нефтяной и газовой промышленности.
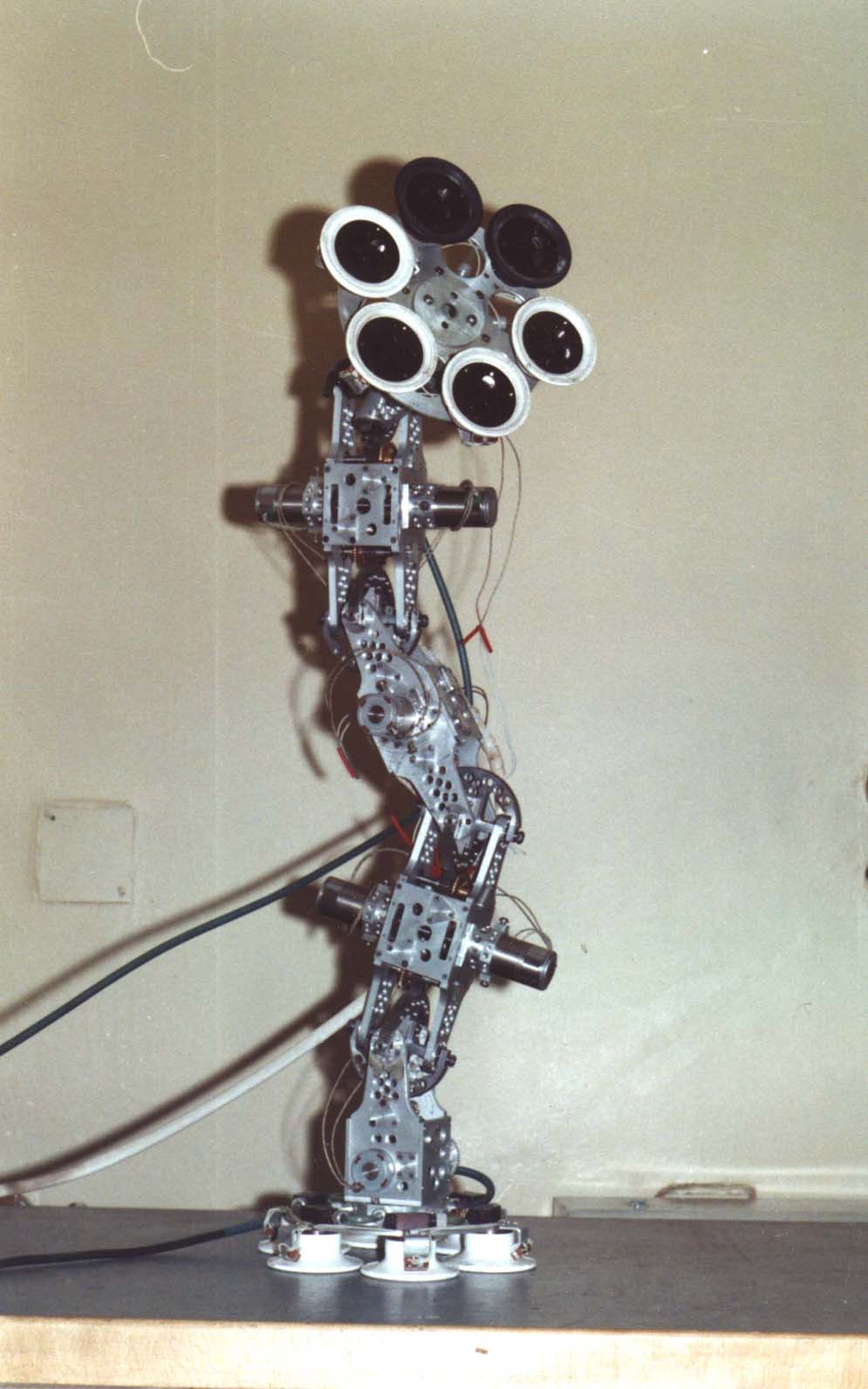 Рис. 2
Рис. 2
На рисунке 2 показан многозвенный мобильный робот, который способен передвигаться по поверхностям со сложным рельефом, переходить с одной поверхности на другую (например, со стены на потолок), преодолевать препятствия и разрывы на поверхности перемещения. На концевых звеньях робота имеются стопы с вакуумными захватами. Движение робота осуществляется с помощью электроприводов, расположенных в шарнирах, соединяющих звенья. Чем больше звеньев, тем более гибок робот в реализации своих движений. Робот имеет модульную конструкцию, число звеньев может изменяться пользователем в зависимости от потребностей.
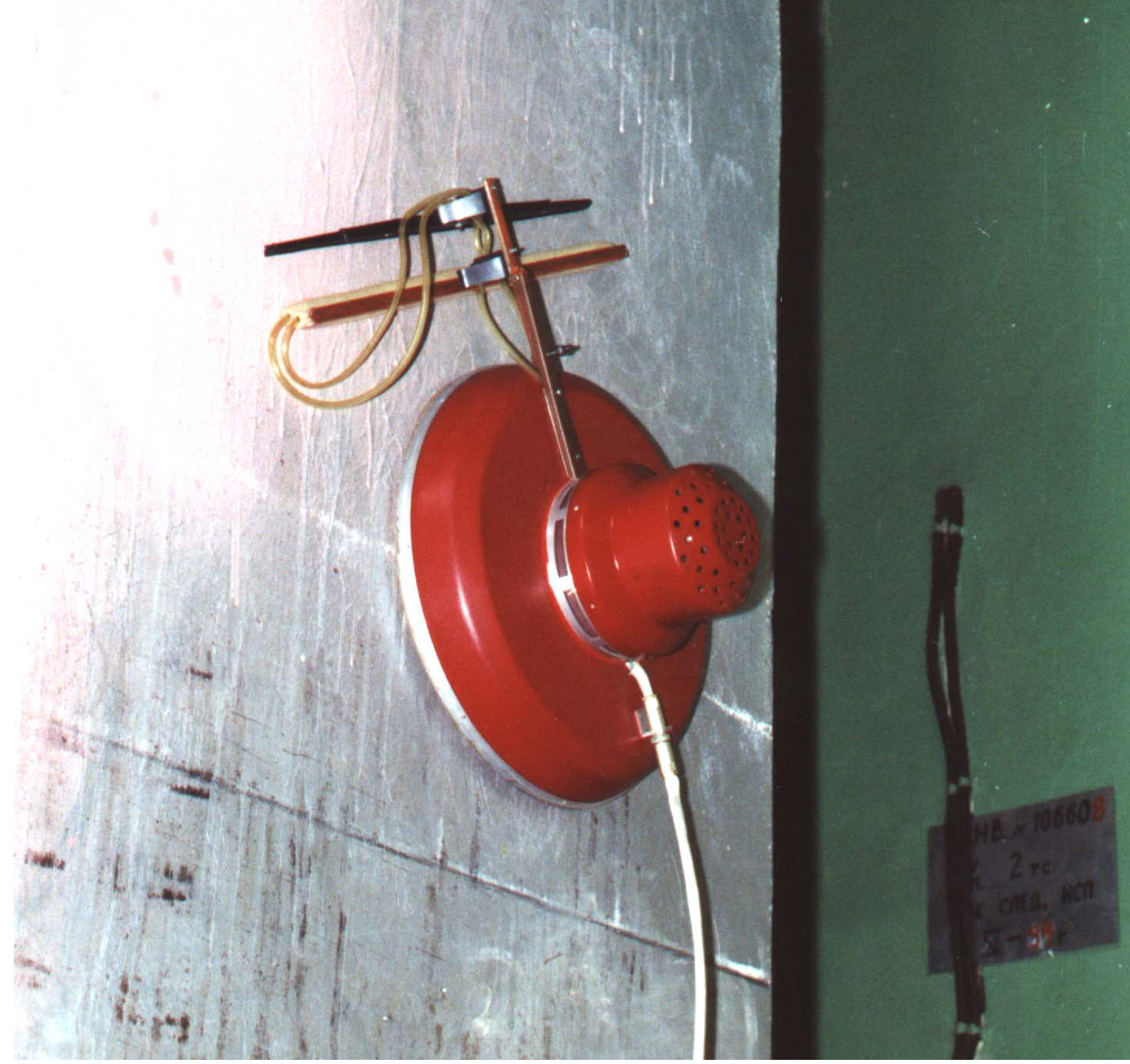 Рис. 3
Рис. 3
На рисунке 3 изображен робот с колесным движителем, предназначенный для чистки и мойки стен и окон. Робот имеет вакуумируемый кожух со скользящим уплотнением. Под кожухом с помощью вентиляторного насоса создается разрежение воздуха, благодаря чему избыточное атмосферное давление прижимает робот к стене и обеспечивает силу трения между колесами и стеной, достаточную для управляемого передвижения по ней.
В нашем Институте ведутся исследования, направленные на создание роботов, перемещающихся внутри труб. Такие роботы нужны, прежде всего, для неразрушающей технической инспекции трубопроводов различного назначения: трубопроводы, транспортирующие нефть или газ, топливопроводы в самолетах и космических аппаратах. Сотрудники Института активно участвовали в исследованиях по созданию уникального восьминогого шагающего робота для перемещения в трубах большого диаметра. Этот робот был разработан и построен в Мюнхенском техническом университете в Германии. Он может перемещаться по трубам любого наклона, включая вертикальные. Сила трения, препятствующая скольжению стоп робота по трубе, создается за счет того, что робот сильно упирается своими ногами в диаметрально противоположные точки стенки трубы. Никаких специальных фиксаторов не требуется. В Институте проблем механики были рассчитаны оптимальные конструктивные параметры и походки, позволяющие роботу с максимальной отдачей использовать возможности приводов, развивать большие тяговые усилия и передвигаться в трубе с высокой скоростью.
 Рис. 4
Рис. 4
Учеными института разработаны миниатюрные роботы, способные двигаться внутри тонких труб без специальных движителей (ног, колес, гусениц). Один такой робот показан на рисунке 4. Он состоит из двух тел цилиндрической формы, которые могут колебаться друг относительно друга под действием электромагнитного привода. Оба тела снабжены ворсистым покрытием, которым они касаются стенок трубы. Ворсинки наклонены в одну сторону относительно оси робота, из-за чего сила трения тел о стенки трубы зависит от направления движения. При включении привода робот весьма быстро перемещается вдоль трубы в направлении меньшего трения. Наклон трубы может быть любым. Роботы такого типа могут быть использованы для обнаружения дефектов в трубопроводах малого диаметра.
Активно ведется поиск новых принципов движения для мобильных роботов. Теоретически и экспериментально изучаются мобильные системы, которые не имеют традиционных движителей (колес, ног, гусениц, винтов), а передвигаются за счет изменения конфигурации или перераспределения внутренних масс, подобно змеям или рыбам. Изменение конфигурации приводит к возникновению и изменению силы трения между звеньями робота и средой, в которой он перемещается, именно по этой причине возможно движение робота как целого и управление им. Такой принцип движения представляется перспективным для миниатюрных роботов, которые могут выполнять различные работы в узких щелях или трубопроводах.
Сложной и важной проблемой является разработка управления мобильными роботами, а также оптимизация режимов их движения, направленная на увеличение скорости перемещения и снижение затрат энергии. Учеными института выработаны базовые принципы оптимального управления мобильными системами данного типа и построены законы управления для роботов различных конструкций.
Еще одно направление исследований Института – микроробототехника. Эти исследования направлены на создание миниатюрных мобильных роботов с широкой перспективой применения в машиностроении, в аэрокосмической отрасли, в топливно-энергетическом комплексе, в медицине. Крупнейшие промышленные фирмы и университеты США, Японии, Германии, Китая, Франции и других стран усиленно работают в этом направлении. В Институте проблем механики изучены особенности физического взаимодействия микророботов с поверхностью перемещения, связанные с малыми массами таких роботов и малыми размерами зон контакта с внешней средой. Оказалось, что на поведение микроророботов значительно влияют силы адгезии, связанные с взаимодействием робота со средой на молекулярном уровне. Для роботов обычных размеров эти силы несущественны.
Институт проблем механики активно и плодотворно сотрудничает в области робототехники с другими институтами Российской академии наук и с вузами. Институт участвует в работе двух научно-образовательных центров (НОЦ), один из которых создан в Московском физико-техническом институте (МФТИ), а другой – в Московском государственном технологическом университете «Станкин». Студенты бакалавриата и магистратуры этих вузов ведут научные исследования в области робототехники под руководством ведущих ученых Института проблем механики. В Институте есть базовая кафедра «Механика и процессы управления» МФТИ, в число учебных курсов которой входит спецкурс «Введение в робототехнику».